Définition : Un exosquelette est une structure externe au corps qui permet des mouvements libres ou pilotés étant soutenu mécaniquement pour réduire ou remplacer un effort musculaire trop important.
Il existe plusieurs types d'exosquelettes :
L'exosquelette de rééducation qui permet de remettre une personne handicapée à niveau.
L'exosquelette d'amplification qui permet d'amplifier la force musculaire du corps humain.
XOS 2 est un exemple d'exosquelette d'amplification américain actuellement en stade expérimental.
L'exosquelette d'immersion qui est une combinaison capable de tromper les sens en permettant de protéger de l'environnement.
omComCo
Combinaison de cosmonaute et scaphandre sous marin, deux exemples d'exosquelettes d'immersion.
L'exosquelette de téléopération permet de piloter une forme robotique humanoïde à distance avec son propre corps (casque, gants, électrodes etc...)
Ce type d'exosquelette n'est que au stade de projet, il n'en existe à ce jour aucun modèle.
Comment fonctionne un exosquelette ?
Un exosquelette se compose de différentes parties :
-Le cadre : c'est la coque de l'exosquelette qui protège les circuits électriques.
-La batterie : c'est l'énergie de l'exosquelette, son autonomie varie en fonction des différents types d'exosquelettes. Lleur autonomie est comprise entre 3 et 20 heures.
-Les capteurs : ils captent les mouvements de l'homme et les envoient au contrôleur.
-Le contrôleur : ordinateur embarqué qui récupère et retransmet les informations.
-Déclencheurs : ils reproduisent les mouvements ordonnés
-Générateur : il contrôle les articulations de l'exosquelette
-Contrôle de l'équilibre et de la démarche : Ceci permettrait à la machine de garder un équilibre en toutes circonstances. Cette partie est encore en phase expérimentale et n'est pas encore introduite dans les exosquelettes existants.
Lorsqu'un mouvement est effectué par l'homme, le cerveau envoie des signaux électriques vers les muscles afin que le mouvement soit effectué, une partie de ces signaux électriques passe par la peau.
Les capteurs de l'exosquelette sont placés à différents endroits sur la peau afin de capter ces signaux et de les envoyer vers le contrôleur afin qu'il les interprète et qu'il réalise l'action qui lui a été programmée.
Un exosquelette bien programmé sera créé de façon à ce qu'il avance quand la personne souhaite avancer. Mais il est possible de le programmer autrement, par exemple de faire en sorte que l'exosquelette fasse un mouvement de marche à reculons lorsque nous voulons avancer. Ce n'est pas très pratique mais c'est possible.
Voici un exemple en image:
http://www.youtube.com/watch?v=U1z
VZaLujlI&feature=youtu.be
Lors d'un mouvement, l'ordinateur embarqué analyse immédiatement la puissance musculaire que l'utilisateur veut employer. L'ordinateur calcule ensuite la puissance que la machine devra déployer en fonction de ce qu'il lui est programmé, cela déprend du type d'exosquelette. Il commande ainsi les générateurs qui actionnent les articulations et mettent les corps mécaniques en mouvement, à l'aide d'un système hydraulique.
Comme la machine doit réagir en même temps que le corps de l'utilisateur, l'ordinateur doit calculer en une fraction de seconde. Un décalage bloquerait les mouvements de la personne et l'empêcherait de bouger, voire de lui faire perdre l'équilibre. C'est pour cela que les mouvements sont pré-enregistrés. Cependant, l'amélioration des exosquelettes permet d'enregistrer de nouveaux mouvements en cours d'utilisation.
Exemple de blocage de mouvement durant les expériences des exosquelettes:
Les capteurs ont une autre utilité : l'équilibre. En effet, prenons par exemple un exosquelette français, Hercule, qui permet aux soldats de l'armée française de porter des sacs de 50 kg comme s'ils en pesaient 10 kg. Un homme sans exosquelette portant une telle charge se penchera naturellement vers l'avant afin de positionner son centre d'équilibre pour compenser le sac qui tire vers l'arrière et donc garder l'équilibre. Mais une personne portant la même charge utilisant l'exosquelette Hercule ne sentira qu'un sac pesant environ 10kg et donc se positionnera de façon à régler son centre d'équilibre pour un sac de 10kg. Si aucun réglage n'est fait, la personne tombera vers l'arrière, c'est pour cela qu'il existe dans le contrôleur un programme utilisant les capteurs pour calculer et compenser ce décalage.
Les batteries embarquées électriques peuvent faire fonctionner un exosquelette complet (qui recouvre entièrement le corps) pour une durée maximale de 3 heures et un exosquelette se situant sur les membres inférieurs peut fonctionner jusqu'à 20 heures. Les recherches d'amélioration des exosquelettes ont permis de trouver un moyen pour le moment hypothétique (mais les recherches concluantes laissent à penser que cela est faisable), qui consisterait à supprimer certains mouvements de l'exosquelette inutiles afin d'économiser la batterie.
Voici un exemple:
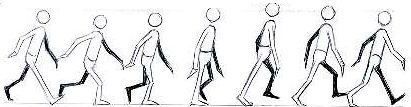
Lorsque l'on marche :
1 2 3 4 5 6 7
Le mouvement de marche a plusieurs étapes que l'on distingue sur ce schéma en 7 parties. Si l'on analyse la jambe en noir, nous pouvons constater que les mouvements 1 à 4, servent à « jeter » la jambe vers l'avant pour avancer. Dans les parties de 5 à 7, la jambe est plus relâchée, jusqu'à ce qu'elle touche le sol. Pour en revenir aux exosquelettes, la suppression de mouvements se fera sur les parties 5 à 7. L'exosquelette ne fonctionnerait plus durant ce laps de temps et repartirait dès que la jambe toucherait le sol. Ainsi, l'exosquelette placé sur la jambe au sol fonctionnerait tandis que l'autre jambe serait en « pause » ce qui permettrait d'augmenter l'autonomie de la batterie.